

NAVVIS M6 실내 모바일 매핑 시스템(MMS)
차세대 SLAM Reality Capture
NavVis의 훌륭한 기술력은 모바일 스캐너임에도 데이터의 품질을 손상시키지 않으며, 360° 파노라마 이미지와 최상급 Point Cloud를 취득이 가능합니다.
![]()
![]()
Speed
NavVis는 규모가 큰 실내환경에서도 일체형 Reality Capture를 제공합니다. NavVis M6 실내 모바일 매핑 시스템은 데이터 품질이 중요한 대규모 스캐닝 프로젝트를 위해 설계되었습니다. 사람이 걷는 속도로 360° 파노라마 이미지와 센서 데이터를 자동으로 취득합니다.
- 고정형 3D 스캐너보다 약 30배 빠른 속도로 스캔할 수 있습니다./li>
- 하루에 30,000평방미터를 스캔할 수 있습니다.
- 스캔하면서 스스로 복잡한 실내환경에 적응합니다.

… 정확성을 충족시키다 …
데이터의 빠르게 수집하더라도 데이터 품질을 손상시키지 않습니다. NavVis M6는 모바일 LiDAR시스템과 혁신적인 매핑 소프트웨어와 결합하여 Survey-grade Scan을 가능하게합니다. 그리고 동시에 360°의 밀도 높은 이미지도 취득합니다.
- All-in-one capture: 사실적인 포인트 클라우드, 360° 파노라마 이미지, 블루투스 비컨, 와이파이, 자기장 데이터
- 6D SLAM: M6는 약 6° 정도 자유성을 가지며 고도와 고르지 않은 지표면의 변화를 정확하게 매핑합니다.
- High accuracy and low drift: 새로운 6D SLAM 시스템에는 드리프트 오류를 최소화하기 위한 정밀 SLAM 기술이 포함되어 있습니다.
… 모바일 스캔의 혁신
NavVis는 실내 데이터를 더 빠르고 쉽게 취득할 수 있도록 설계되었습니다. NavVis는 작업자 한 명이 조립 및 분해할 수 있습니다. 작업자 한 명이 장치설정에서 데이터 퍼블리싱까지 쉽고 빠르게 작업할 수 있습니다.
- 조립이 쉽고 해치백 차량으로 운반이 가능합니다.
- M6는 장비 조립 부터 데이터 퍼블리싱까지 혼자서 가능합니다.
- Optional ground control point는 NavVis의 Workflow와 호환됩니다.

NavVis만의 차별성!
NavVis M6 모바일 매핑 시스템이 실내를 스캔하는 방법을 어떻게 변화시킬 수 있는지 알아보세요. 속도, 사용성, 안정성 및 정확도를 위해 설계된 M6는 복잡한 실내환경도 신속하게 스캔할 수 있습니다. M6는 현실을 정확하게 스캔 할 수 있는 모바일 매핑 시스템입니다.
Snaps into place
M6는 조립이 매우 간편합니다. 조립은 케이스에서 부품을 꺼내 제자리에 끼우기만 하면 되므로, 한명의 작업자가 분해 및 조립이 가능합니다. 스캔 중에 통로가 좁아지거나 천장이 낮아지면 기계의 높이와 폭을 조정해 스캔을 이어갈 수 잇습니다.


One tap to start
M6의 UI는 직관적이며 사용이 편리합니다. 단순히 Start 버튼을 클릭하고 M6를 움직이면 스캔을 시작합니다. 그리고 화면에 공유되는 실시간 Feedback을 통해 작업자는 이미 스캔된 영역과 스캔 해야할 영역을 바로 알아볼 수있습니다.
Conquer every environment
평평하지 않은 지면, 오르막길, 좁은 복도, 열린공간 어디서근 자유롭게 스캔하세요. M6가 자유롭게 이동할 수 있는 한 6D SLAM 기술이 스캔 오류를 잡아줍니다.

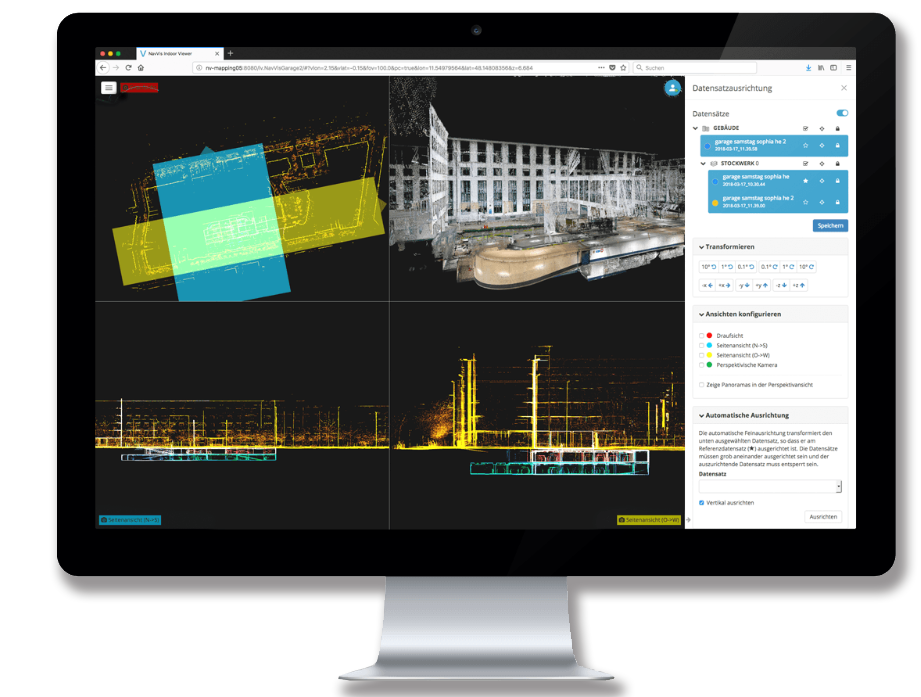
Seamless workflow
스캔의 시작과 끝은 쉽고 간단합니다. 스캔 데이터는 이동식 SSD에 저장됩니다. 저장된 데이터는 후처리용 Ubuntu PC로 백업한 후 NavVis 전용 소프트웨어인 SiteMaker에서 데이터 후처리를 할 수 있습니다. 후처리된 데이터는 NavVis IndoorViewer(페이지 하단에서 체험 가능합니다.)게시하거나 CAD 소프트웨어로 불러올 수 있습니다.
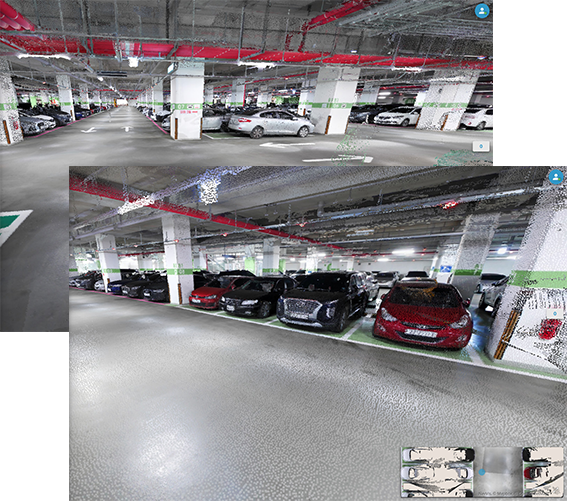
High quality reality capture
모바일 스캐닝이 데이터의 품질을 손상시키지는 않습니다. M6의 4개의 레이저 스캐너는 고밀도 Point Cloud를 취득하며 6개의 카메라는 360°의 파노라마 이미지를 취득합니다.NavVis만의 혁신적인 디자인과 안정적인 기술력을 믿고 모바일 스캐닝을 해보세요.

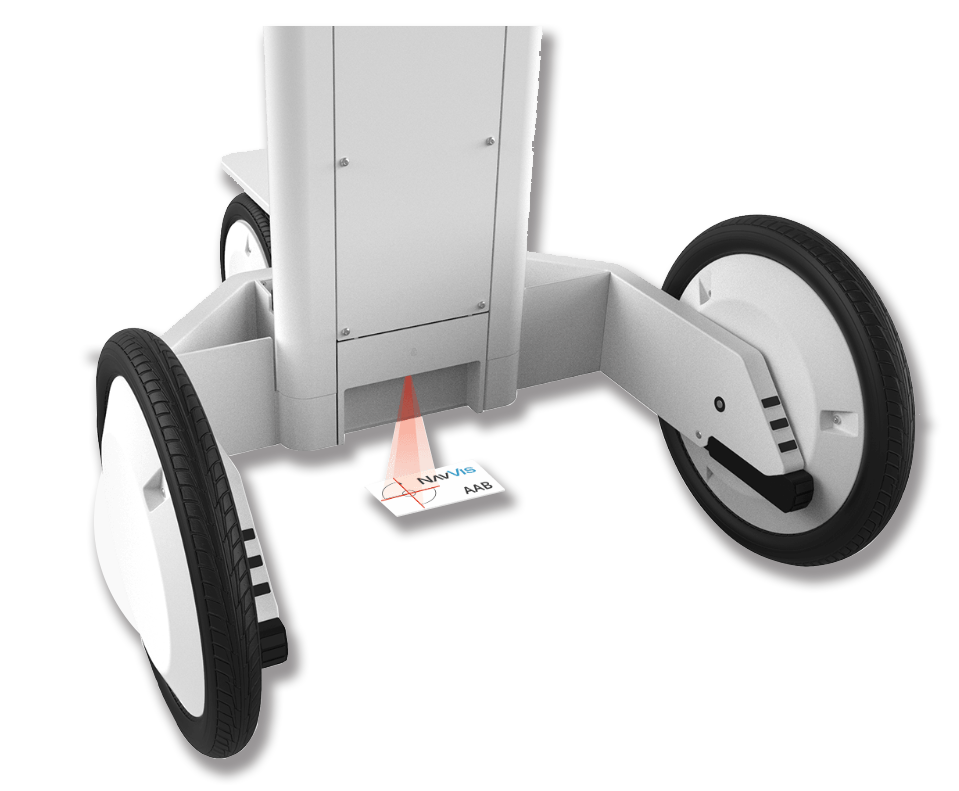
Survey-grade results
스캔 중 좌표점 내릴 수 있습니다. “SLAM anchor”를 활용하면 Point Cloud의 오차 범위를 줄일 수 있습니다. 좌표값 입력은 데이터 후처리 단계에서 입력하면됩니다. 후처리된 데이터는 좀 더 오차범위가 줄어들게 됩니다. 조금더 안정적인 데이터를 원한다면 SLAM anchor 기능을 활용하세요.
Designed for transport
M6는 크게 4개의 박스로(Head Unit box, Body Unit box, Wheel Unit box, Batter Box) 구성 되어있습니다. 4개의 박스는 박스끼리 분해 결합이 가능하므로 M6 운반시 많은 인력을 필요로 하지 않습니다.

FIND MORE DETAILS ON THE DATA OUTPUT BELOW

360° IMAGES
6 high resolution cameras
–
Images: 6 x 16 megapixel
–
Optimized for high dynamic range and low-light

POINT CLOUDS
3 single layer laser scanners
–
1 multi-layer laserscanner
–
Photorealistic point clouds: up to 5mm resolution
–
Point cloud formats: LAS, PLY, PTS, XYZ, E57

FLOORPLANS
Autogenerated 2D maps
–
Create CAD floorplans and BIM models with point cloud data
–
Publish floorplans (dxf) in IndoorViewer

INFRASTRUCTURE DATA
Navigation graph
–
Bluetooth data
–
Wifi signals
–
Earth magnetic field data